 Portugués
Portugués  Inglés
Inglés  Español
Español 
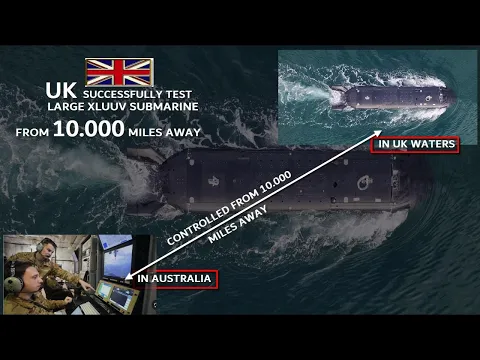
Submarino no tripulado del tamaño de un autobús corto ya ha sido operado a miles de kilómetros de distancia, en pruebas oficiales que unen Reino Unido y Australia. Bautizado como XV Excalibur, el vehículo abre camino para misiones persistentes y discretas en el fondo del mar.
Un submarino sin tripulación, lo suficientemente grande para recordar un mini-submarino y conectado a operadores a más de 16 mil kilómetros de distancia, ha pasado a simbolizar una nueva etapa de la autonomía naval.
Se trata del Experimental Vessel (XV) Excalibur, vehículo submarino no tripulado clasificado por la Royal Navy como un Extra-Large Uncrewed Underwater Vehicle (XLUUV), con 12 metros de longitud y un desplazamiento de 19 toneladas.
En pruebas divulgadas oficialmente, el sistema fue controlado en aguas del Reino Unido desde un centro de operaciones en Australia, en una demostración de interoperabilidad a gran escala entre aliados.
-
España sorprende al mundo al erigir 62 dunas artificiales, mezclar arena con restos naturales de posidonia y hacer que la estructura pierda solo el 1,4% del volumen en 1 año.

-
Con 16 misiles Bulava, mejoras en la furtividad acústica y un diseño orientado a patrullas silenciosas, el submarino nuclear de Rusia nació para garantizar la retaliación invisible de Moscú y se convirtió en uno de los pilares de su fuerza en el mar.

-
Cidade ‘populosa’ en Río entre las peores de Brasil en ranking nacional y expone crisis silenciosa de desarrollo.

-
Casal compra casa en la zona Sur de São Paulo, abre una puertita escondida en el garaje y encuentra una bodega secreta con decenas de vinos antiguos olvidados desde los años 1970.

Royal Navy y el XLUUV operado a más de 16.000 km
El Excalibur fue presentado como el primer submarino no tripulado de la Royal Navy y, por sus dimensiones, también como el mayor vehículo submarino no tripulado que ha sido probado por la fuerza.
La propia Marina británica describió el modelo como un “vessel” experimental con dos metros de ancho, construido para acelerar el aprendizaje sobre cómo operar plataformas autónomas de gran tamaño debajo de la superficie.
La propuesta es clara: poner en el mar un sistema capaz de navegar, ejecutar tareas y recolectar datos sin la presencia de tripulantes, manteniendo la discreción típica del entorno submarino.
Lo que más llama la atención, sin embargo, no es solo el tamaño.
El hito más inusual llegó en una serie de experimentos relacionados con la cooperación tecnológica entre Reino Unido, Australia y Estados Unidos.
Según un comunicado de la Royal Navy sobre el ejercicio, el control de un XLUUV británico en aguas británicas fue ejecutado desde un centro remoto en Australia, a más de 10 mil millas de distancia del puerto base de Plymouth.
Esta equivalencia supera 16 mil kilómetros y fue tratada como una primera demostración, en el ámbito del AUKUS Pillar 2, de “interchangeability” y interoperabilidad del tipo “una sola fuerza” para este nivel de vehículo submarino no tripulado.
Comunicación submarina e interoperabilidad AUKUS Pillar 2
La operación a larga distancia ocurre en un escenario en el que el fondo marino impone limitaciones naturales a la comunicación.
Las ondas de radio tienen un alcance extremadamente reducido en el agua de mar, y la transmisión de datos suele depender de métodos acústicos y de rutinas específicas de comunicación.
Dentro de este contexto, el Excalibur fue mencionado como pieza central de una iniciativa que busca hacer más natural el empleo de sistemas robóticos y autónomos en el dominio marítimo, sin exigir la presencia constante de barcos de apoyo o de equipos embarcados.
Project Cetus, Submarine Delivery Agency y el Excalibur experimental
El origen del Excalibur está en el Project Cetus, programa británico que resultó en un vehículo experimental diseñado para probar tecnologías, procedimientos y cargas específicas.
De acuerdo con el gobierno del Reino Unido, el proyecto fue desarrollado por la Submarine Delivery Agency (SDA), en colaboración con la empresa MSubs Ltd, con patrocinio de la Royal Navy.

La intención declarada es construir confianza en autonomía y usar la plataforma como banco de pruebas para evaluar misiones y “payloads” militares, sin clasificarla como un submarino de empleo operacional inmediato.
La ceremonia de nombramiento y presentación pública tuvo lugar en la base naval de Devonport, y el Excalibur fue descrito como resultado de un ciclo de desarrollo de tres años.
El anuncio oficial de la Royal Navy destacó que, en los dos años siguientes a la presentación, el vehículo pasaría por extensas pruebas de mar para mapear desafíos específicos de la operación de un sistema de este tamaño sin tripulantes.
Entre los objetivos citados por las autoridades de la Marina británica, está la construcción de conocimiento práctico que permita, en el futuro, la coexistencia de plataformas tripuladas y no tripuladas en un mismo conjunto de capacidades.
La explicación para tanto interés aparece en el tipo de ambiente que estos sistemas buscan atender.
La Royal Navy asoció la iniciativa a demandas de protección de infraestructura y recolección de información en el dominio submarino, además del avance de tecnologías que amplíen la presencia persistente en el mar.
El discurso institucional enfatiza que un vehículo experimental como el Excalibur puede ayudar a entender límites y oportunidades de sensores, navegación, control e integración con otros medios, creando una base para conceptos más avanzados.

Reloj cuántico Tiqker, Infleqtion y navegación sin GPS
Además de las pruebas de interoperabilidad a larga distancia, el gobierno británico informó sobre un experimento con un componente que suele aparecer en proyectos de vanguardia: un reloj cuántico.
El Excalibur fue al mar con un dispositivo descrito como “quantum optical atomic” y apodado como Tiqker, desarrollado por la empresa británica Infleqtion.
El objetivo presentado fue mejorar la precisión del tiempo y la navegación en un tipo de embarcación que no puede depender completamente del GPS cuando está sumergida.
En la práctica, la promesa de mayor estabilidad temporal reduce la necesidad de señales externas y puede apoyar misiones en las que permanecer sumergido por períodos más largos es parte importante del rendimiento.
El modelo también fue citado por el gobierno como habiendo pasado por un conjunto de pruebas de aceptación desde el lanzamiento y, al final del proceso, haber sido oficialmente entregado a la Royal Navy para un programa de evaluación y aprendizaje.
En esta fase, la SDA seguiría apoyando a la Marina británica para extraer lecciones sobre la introducción de autonomía en usos futuros, centrándose en entender cómo sistemas de este tipo pueden ser integrados a capacidades ya existentes en el dominio submarino.
El Excalibur, por lo tanto, aparece como un “gran laboratorio” a escala real: lo suficientemente grande para representar desafíos operacionales similares a los de medios mayores, pero concebido explícitamente para probar tecnologías, protocolos e integración entre países aliados.
Al confirmar que el control y la comunicación con el vehículo ocurrieron mientras estaba sumergido y en un escenario de operación remota a más de 10 mil millas, la Royal Navy estableció un punto de referencia para lo que considera posible hacer con vehículos autónomos de gran tamaño en el fondo del mar.
Si un submarino robótico de 12 metros ya puede ser controlado a más de 16.000 km y servir de plataforma para pruebas de navegación cuántica, ¿cuál será el próximo límite práctico de la autonomía submarina?




-

-

-

-

-

-

54 pessoas reagiram a isso.