 Portugués
Portugués  Inglés
Inglés  Español
Español 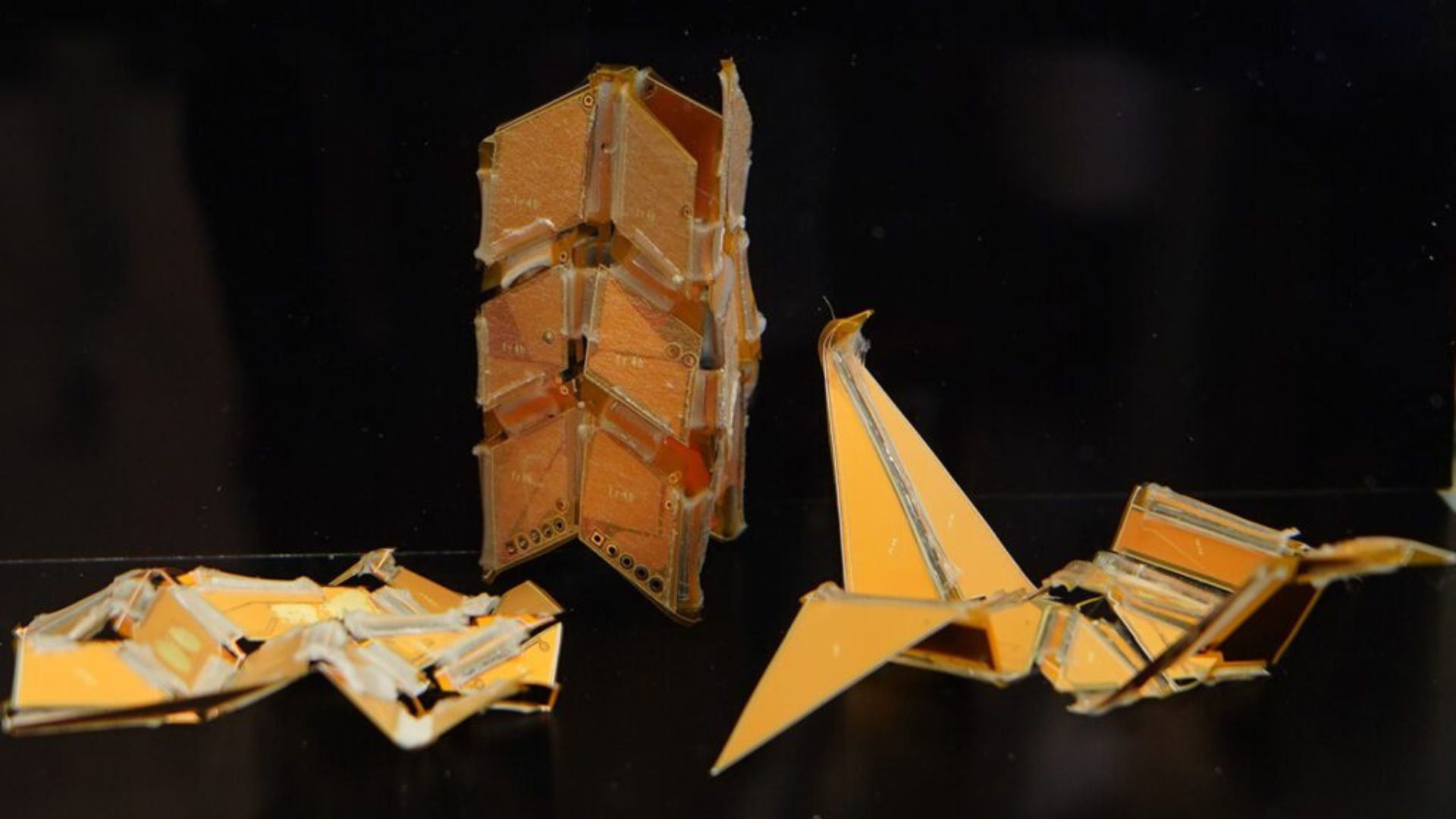
Tecnología de impresión 3D y elastómeros permiten que robots suaves operen con circuitos integrados y contracción térmica.
Ingenieros de la Universidad de Princeton desarrollaron un robot flexible impreso en 3D capaz de moverse y alterar su forma utilizando calor, eliminando la necesidad de motores o sistemas neumáticos externos. El dispositivo híbrido combina un polímero imprimible con electrónicos flexibles y técnicas de plegado basadas en origami para realizar desplazamientos precisos.
El avance tecnológico, liderado por los profesores Emily Davidson y Glaucio Paulino, utiliza un material conocido como elastómero de cristal líquido (LCE).
Esta sustancia posee una estructura molecular ordenada que permite la contracción térmica controlada. Al recibir electricidad, placas de circuito impreso flexibles embebidas en el material calientan áreas específicas, activando el movimiento sin componentes mecánicos tradicionales.
-
Alerta de seguridad: La proliferación de códigos QR falsos en lugares públicos facilita fraudes financieras y el robo de datos personales.

-
Nuevos modelos de IA pueden detectar problemas en cráteres y prever deslizamientos subterráneos con alta precisión.

-
Finlandia finaliza el primer depósito de basura nuclear del mundo en una formación rocosa estable de 1,9 mil millones de años para protección milenaria.

-
La Generación Z rescata iPods clásicos e invierte en modificaciones técnicas para crear una zona de escucha libre de notificaciones y algoritmos.
Diseño inspirado en origami y funcionalidad
El equipo demostró la eficacia de la tecnología al construir un robot flexible impreso en 3D en forma de una grulla, figura clásica del origami japonés. Cuando la corriente eléctrica recorre los circuitos internos, el calor generado hace que las bisagras de polímero se contraigan, resultando en el aleteo de la estructura. Este método permite que el robot realice secuencias de movimientos programables en tiempo real, manteniendo la capacidad de regresar a su forma original.
Para garantizar que el pliegue ocurra solo en los lugares deseados, los investigadores reforzaron las secciones entre las bisagras con paneles delgados de fibra de vidrio.
Estos paneles están fijados directamente a los circuitos flexibles, creando zonas rígidas que dirigen la fuerza de la contracción térmica. Esta configuración híbrida asegura que el robot flexible impreso en 3D ejecute movimientos suaves y coordinados, simulando la fluidez de organismos biológicos.
Precisión y durabilidad en la fabricación
La fabricación del dispositivo utiliza una impresora 3D personalizada que deposita el polímero fundido en zonas estandarizadas. Durante el proceso, los circuitos electrónicos y sensores de temperatura se integran directamente al cuerpo del robot, y no solo se aplican sobre la superficie. Esta integración profunda es fundamental para el funcionamiento del robot flexible impreso en 3D, ya que permite un control de circuito cerrado sobre el calentamiento de las articulaciones.
Las pruebas de laboratorio indicaron que el sistema puede operar repetidamente sin mostrar signos de desgaste o degradación significativa.
La ausencia de engranajes y tubos de aire reduce drásticamente el peso y la complejidad del proyecto, aumentando la durabilidad de la estructura. El robot flexible impreso en 3D demostró ser capaz de seguir comandos precisos, confirmando la viabilidad del uso de materiales inteligentes para reemplazar sistemas de propulsión convencionales.
Potencial de aplicación y autonomía
La capacidad de moverse en espacios reducidos donde robots tradicionales fallarían es una de las principales ventajas de esta innovación.
Como el robot flexible impreso en 3D no depende de bombas externas o motores voluminosos, ofrece una solución compacta para tareas de navegación complejas. El sistema responde rápidamente a las variaciones térmicas, permitiendo ajustes inmediatos en la trayectoria o en la postura del dispositivo durante la operación.
La investigación, detallada en la revista Advanced Functional Materials, abre camino para el desarrollo de máquinas suaves más autónomas y adaptables. El uso de elastómeros de cristal líquido y electrónicos integrados define un nuevo estándar para la robótica suave, enfocándose en la eficiencia del material.
Futuros modelos basados en el robot flexible impreso en 3D podrán ser aplicados en diversas áreas que requieran movimientos delicados y alta resistencia estructural.
Haga clic aquí para acceder al estudio.



Seja o primeiro a reagir!