 Portugués
Portugués  Inglés
Inglés  Español
Español 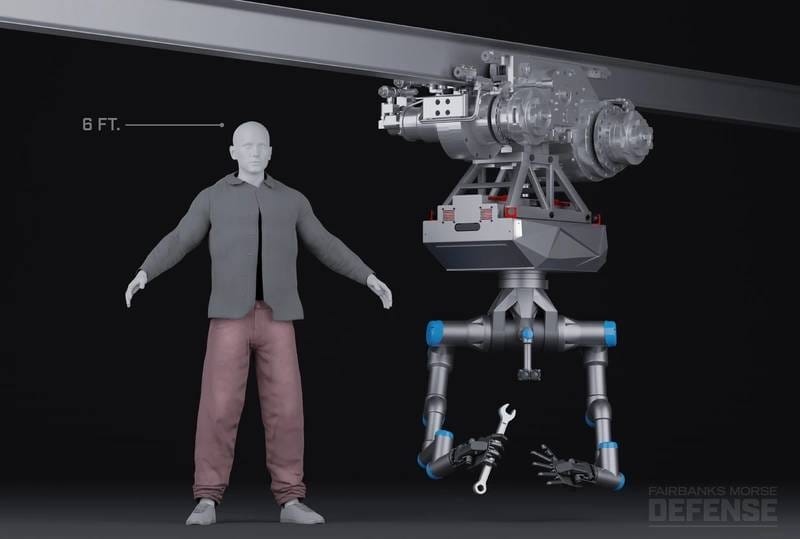
Buques autónomos plantean la cuestión del mantenimiento de emergencia y rutina. Los desafíos incluyen IA, robótica y comunicaciones seguras.
Los avances tecnológicos en el área de la robótica están revolucionando diversos sectores de la industria, y el mercado marítimo no es una excepción. La automatización de procesos y la implementación de robots en buques autónomos están transformando la forma en que se realizan las operaciones, aportando mayor eficiencia y seguridad al sector. FMD es una de las empresas que ha estado invirtiendo en investigación y desarrollo de robótica para la sala de máquinas, con el objetivo de mejorar las prácticas de mantenimiento y reparación de buques autónomos.
El futuro de la robótica en el entorno marítimo
El equipo de FMD que lidera Trey Taylor es relativamente nuevo, comenzando en 2019 con un producto básico que analizaba equipos de monitoreo, ‘siendo capaz de proporcionar esta información a nuestros equipos técnicos para diagnóstico y también proporcionar algunos datos al cliente final para autoevaluación’. Pero eso fue solo el comienzo y, en 2020, el equipo de Taylor pidió más al equipo ejecutivo. El resultado fue ‘una hoja de ruta para cinco verticales de productos en los que estábamos interesados: IA, autonomía, robótica, capacidad de realidad mixta y comunicaciones seguras.’
En el desarrollo de soluciones robóticas para los trabajos de rutina y de emergencia y reparaciones en la sala de máquinas, Taylor acredita a su jefe, CEO de FMD, George Whittier, por inculcar su principio: ‘No apuntes al objetivo, apunta a donde estará el objetivo’.
-
Petrobras evalúa la suspensión de ventas a distribuidoras y estudia cancelar la subasta de gas de cocina tras las directrices del Gobierno Federal.

-
Lula revela una jugada maestra de Petrobras para deshacer un negocio realizado por Bolsonaro y esto involucra el regreso de una importante refinería que hoy produce menos de la mitad de lo esperado y hace que Brasil dependa del diésel internacional.

-
Estudio confirma que el sector de gas natural reducirá un 0,5% las emisiones de gases de efecto invernadero en Brasil y acelera la transición energética para 2026.

-
Petrobras aplica un reajuste severo y confirma un aumento del precio del queroseno de aviación del 55% con una propuesta de parcelamiento para las compañías.

Entonces, Taylor y su equipo de 22 personas comenzaron a mirar más de cerca a uno de sus principales clientes – la Marina de EE.UU.. ‘Sabemos que la Marina tiene una necesidad, un deseo de abastecer los recursos no tripulados en algún momento a finales de esta década, y el plazo que desean que estos recursos sean implantados sin intervención es hoy de solo 30 a 60 días’, dijo Taylor. ‘Pero la meta de largo plazo es de 180 días, así que nuestro equipo comenzó a buscar sistemas para ayudar a la Marina a alcanzar esa meta. Rápidamente llegamos a la conclusión de que tendríamos que hacer mantenimiento, pero ¿cómo hacemos el mantenimiento cuando no hay un humano a bordo?’ Entra el robot.
 ‘Necesitarás recursos diferentes en momentos diferentes’, dijo Taylor. ‘Por ejemplo, si estoy haciendo algo en un motor, tal vez necesite ser capaz de levantar y soportar 150-200 libras; pero también puedo necesitar una manipulación muy precisa de pequeños accesorios para quitar esa pieza. Así que probablemente no tendré un robot bípedo de dos brazos. Tendré un robot que puede apoyarse en un riel o en un mamparo para ese levantamiento pesado, y puede tener cuatro brazos, dos brazos de movimiento bruto que pueden manejar el levantamiento pesado y, luego, dos brazos hábiles que están haciendo los movimientos de fijación perfectos.
‘Necesitarás recursos diferentes en momentos diferentes’, dijo Taylor. ‘Por ejemplo, si estoy haciendo algo en un motor, tal vez necesite ser capaz de levantar y soportar 150-200 libras; pero también puedo necesitar una manipulación muy precisa de pequeños accesorios para quitar esa pieza. Así que probablemente no tendré un robot bípedo de dos brazos. Tendré un robot que puede apoyarse en un riel o en un mamparo para ese levantamiento pesado, y puede tener cuatro brazos, dos brazos de movimiento bruto que pueden manejar el levantamiento pesado y, luego, dos brazos hábiles que están haciendo los movimientos de fijación perfectos.
Imagen cortesía de FMD
Perspectivas de la robótica marítima
Hoy, el trabajo de FMD no se centra en una sola solución, sino en una serie de diferentes manifestaciones de cómo será y funcionará la robótica de la sala de máquinas. ‘Decidimos que una plataforma robótica probablemente será el enfoque correcto, pero queremos asegurarnos de entender los problemas y comprender los requisitos reales del producto que un robot tendría que facilitar’, dijo Taylor, un proceso que significaba comprender la hoja de ruta a largo plazo de la Marina. Como es habitual en el espacio marítimo, rara vez o nunca existe una solución técnica de ‘talla única’, basada en la amplia variedad de diseños de buques. ‘Hay muchos desafíos importantes al trabajar en un entorno marino’, dijo Taylor. ‘Tengo mamparos por los que necesito pasar; tengo espacios confinados y espacios abiertos. En algunos casos, puedo querer una plataforma robótica montada en un mamparo; en algunos casos, transitaré sobre rieles; en algunos casos, se me pedirá que recorra el espacio con un diseño de orugas o legged. Por lo tanto, cuando miramos la plataforma robótica, hoy estamos realmente enfocados en la modularidad y esos subcomponentes.’
Además de la mecánica, el entorno operativo se tiene en cuenta. ‘¿Cómo hago el servicio cuando estoy en una zanja de casi dos metros de altura en un barco que se mueve a 20 nudos?’, pregunta Taylor. ‘Un ser humano es muy bueno en descubrir su propia estabilización, tres puntos de contacto, una mano sosteniendo una herramienta. Un robot debe ser capaz de hacer lo mismo.’ Al reducirlo a su esencia, Taylor dijo que se imagina como Legos.
Hacia la autonomía de la robótica marítima
‘Existen componentes esenciales que todo robot necesitará: cierta autonomía básica, cierta IA básica, la manera en que se entrena para moverse, la manera en que se controla de forma remota, sistemas de visión, etc., que son elementos comunes de la plataforma. Pero entonces, cuando pienso en todos los equipos que voy a cambiar o interactuar, puedo necesitar 15, 20 herramientas diferentes de diferentes tamaños. Necesitaré diferentes capacidades de elevación; y todo eso requiere que nuestra plataforma sea capaz de adaptarse a ello; reemplazar piezas automáticamente para ir a un lugar de trabajo específico o configuraciones diferentes en ese robot. Pero quiero una metodología de control común; Quiero una metodología de carga común; Quiero una metodología de autonomía común.’
En última instancia, todo se reduce al principio rector que rodea cualquier tecnología compleja: mantenerlo simple, lo que es mucho más fácil de decir que de hacer.
El papel de la robótica en la sala de máquinas
‘Necesitaremos recursos diferentes en momentos diferentes’, dijo Taylor. ‘Por ejemplo, si estoy haciendo algo en un motor, tal vez necesite ser capaz de levantar y soportar 150-200 libras; pero también puedo necesitar una manipulación muy precisa de pequeños accesorios para quitar esa pieza. Así que probablemente no tendré un robot bípedo de dos brazos. Tendré un robot que puede apoyarse en un riel o en un mamparo para ese levantamiento pesado, y puede tener cuatro brazos, dos brazos de movimiento bruto que pueden manejar el levantamiento pesado y, luego, dos brazos hábiles que están haciendo los movimientos de fijación perfectos.
En última instancia, si tiene éxito con una amplia adopción, el uso de la robótica en la sala de máquinas podrá cambiar el diseño real del propio motor. Al principio, la robótica debe ser diseñada para conducir sus negocios como si fuera un ser humano, por lo tanto, al menos, FMD está diseñando [la robótica] para ser equivalente a un ser humano en fuerza y amplitud de movimiento.
Desafíos en el desarrollo e implementación de robótica marítima
Pero a medida que la autonomía gana fuerza, habrá una brecha. ‘Habrá una pequeña brecha entre el momento en que estos buques sin tripulación comiencen a ser lanzados y antes de que haya un número suficiente de ellos en la flota para que los proveedores de equipos de capital rediseñen sus sistemas para soporte robótico’, dijo Taylor. ‘Por lo tanto, tenemos que llenar una brecha donde tenemos rendimiento equivalente humano en muchos casos, para manipulación de herramientas, para alcance, para grados de libertad de movimiento, la cinemática de mover realmente piezas dentro y fuera de un equipo, por ejemplo: estamos teniendo eso en cuenta en nuestros diseños hoy.’
‘Hoy, estamos en lo que llamamos generación 0.2, donde tenemos un prototipo que se mueve. Tenemos recursos de control con detección limitada a bordo, pero hay muchas investigaciones basadas en datos que necesitamos hacer para influir en la próxima generación. En este momento estamos realizando una evaluación científica de los procedimientos básicos y principales de mantenimiento de un motor, donde estamos haciendo el mapeo: ¿Cuál es la cantidad de conexiones? ¿Cuáles son los tamaños? ¿Cuál es el volumen que tengo para realizar los servicios como humano? ¿Cuánto torque necesito en cualquier conexión individual en esos procedimientos de mantenimiento? Estamos haciendo esta documentación ahora mismo, mientras hablamos, en nuestros motores, lo que probablemente nos llevará durante todo el año [2023]’, con el plan de tener una plataforma básica para 2025.
Como se publicó en Edición de diciembre de 2023 de Maritime Reporter & Engineering News. Mira la entrevista completa con Trey Taylor en Maritime Reporter TV:
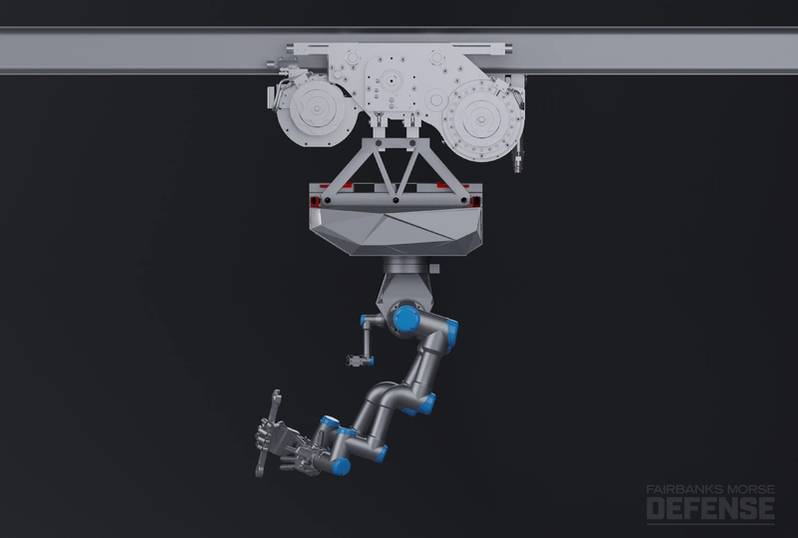 Imagen cortesía de FMD
Imagen cortesía de FMD
Tecnología Robótica Marítima







Seja o primeiro a reagir!