
 Portugués
Portugués  Inglés
Inglés 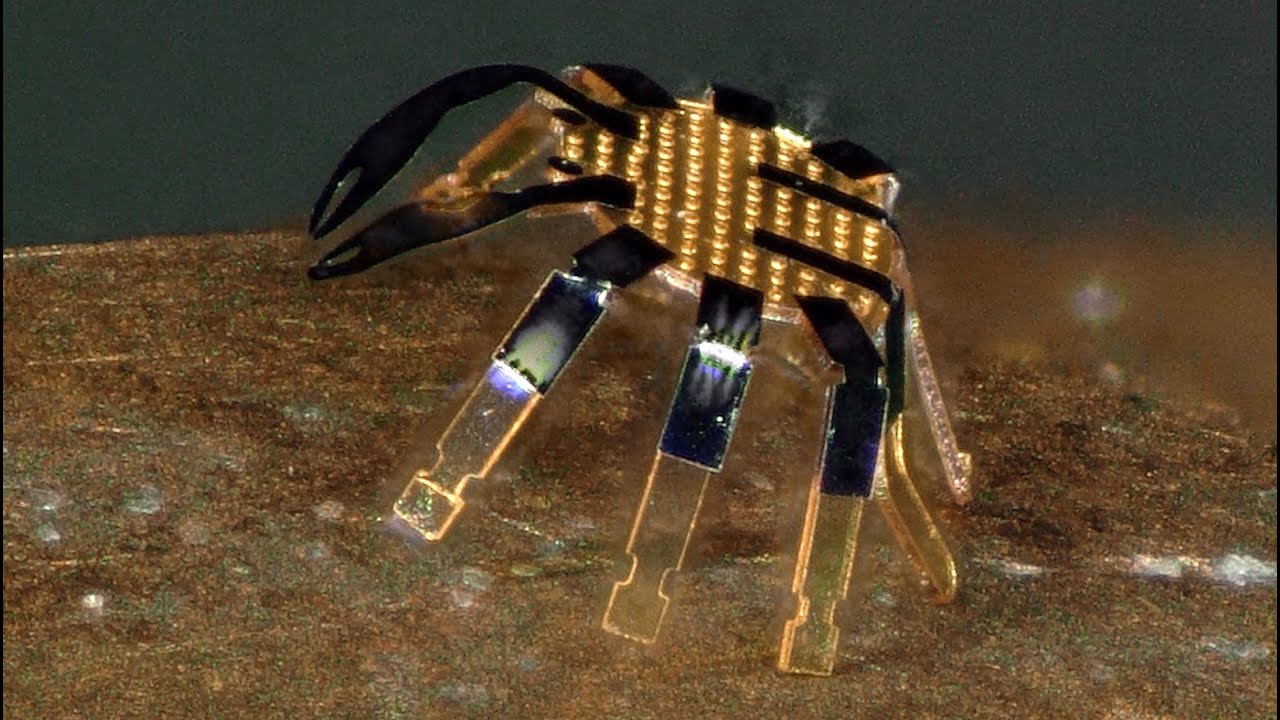
Microrrobot de Northwestern mide 0,5 mm, se mueve sin motores usando calor y puede revolucionar aplicaciones médicas y tecnológicas.
En mayo de 2022, investigadores de la Northwestern University, en Estados Unidos, presentaron uno de los robots más pequeños jamás desarrollados: un microrrobot con forma de cangrejo de apenas 0,5 milímetros de ancho, más pequeño que una pulga y prácticamente invisible a simple vista. El estudio fue publicado en la revista científica Science Robotics y detallado por la propia universidad en un comunicado oficial divulgado en el mismo período.
El proyecto fue liderado por el ingeniero John A. Rogers, especialista en materiales y sistemas bioinspirados, y por el investigador Yonggang Huang, con enfoque en mecánica aplicada y microingeniería. El objetivo central era demostrar que estructuras robóticas pueden operar en escalas extremadamente reducidas sin depender de motores convencionales, baterías o sistemas electrónicos tradicionales.
El resultado fue un microrrobot funcional capaz de andar, arrastrarse, girar y hasta saltar, utilizando solo estímulos térmicos para generar movimiento. Este enfoque rompe con el paradigma clásico de la robótica, que depende de componentes electromecánicos, y abre camino para una nueva generación de dispositivos miniaturizados.
-
Descubren en el universo distante una galaxia con forma de medusa gigante, cuyos tentáculos de gas brillantes forman estrellas mientras se mueve por un mar de gas ardiente.

-
Casi 4 de cada 10 litros de agua tratada se pierden en Brasil antes de llegar a los hogares, pero ahora empresas utilizan satélites, IA, helio y tecnología avanzada para mejorar el acceso al saneamiento en comunidades remotas.

-
Cilindro innovador con esferas de acero logra 14% de amortiguación sin sensores ni electricidad, con patente en EE.UU., para reducir vibraciones en rascacielos, puentes y equipos sensibles.
-
Faro en medio del desierto del Mojave sorprende a visitantes: a más de 160 km del mar, 15 metros de altura y un alcance de 19 km, creado por un artista tras años de burocracia.





Estructura del robot utiliza aleaciones con memoria de forma que se deforman y retornan a la forma original cuando se calientan
El funcionamiento del microrrobot se basa en un principio físico conocido como memoria de forma. El dispositivo está construido a partir de una aleación metálica especial que puede ser deformada y, al ser calentada, regresa a su forma original.

En el caso del cangrejo robótico, este material está moldeado en una estructura microscópica con múltiples “piernas” articuladas. Cuando se somete a variaciones de temperatura, partes específicas de la estructura se contraen o se expanden, generando movimiento.
Este mecanismo elimina la necesidad de motores, engranajes o circuitos eléctricos internos, haciendo que el robot sea extremadamente ligero y compacto.
El control del movimiento se realiza mediante fuentes externas de calor, como láseres dirigidos, que calientan regiones específicas del robot e inducen deformaciones controladas.
Movimiento del microrrobot es generado por ciclos térmicos que permiten andar, girar, arrastrarse y saltar en diferentes direcciones
A diferencia de los robots tradicionales, que utilizan motores para generar movimiento continuo, el microrrobot de Northwestern opera por ciclos térmicos rápidos.
Cuando un área del material se calienta, se contrae. Cuando se enfría, regresa a la posición original. Al repetir este proceso en secuencia, es posible generar patrones de movimiento.
Este sistema permite que el robot ejecute diferentes tipos de locomoción, incluyendo caminar, rotar y hasta pequeños saltos, dependiendo de la forma en que se aplique el calor.
La precisión del control depende de la intensidad y la ubicación del estímulo térmico, lo que exige sistemas externos altamente calibrados.
Diseño inspirado en cangrejos permite estabilidad y eficiencia incluso en escala microscópica
La elección de la forma de cangrejo no es solo estética. Este tipo de estructura ofrece ventajas biomecánicas importantes.
Los cangrejos tienen múltiples patas distribuidas lateralmente, lo que proporciona estabilidad y capacidad de movimiento en diferentes direcciones. Al replicar este diseño a escala microscópica, los investigadores lograron crear un robot que mantiene el equilibrio incluso en superficies irregulares.
La bioinspiración fue fundamental para transformar un concepto físico en un sistema funcional, capaz de operar en condiciones reales.
Además del cangrejo, el equipo también desarrolló otras formas, como orugas y pequeños insectos, demostrando la versatilidad de la técnica.
Proceso de fabricación utiliza técnicas de microfabricación similares a las de la industria de semiconductores
La construcción del microrobot implica procesos avanzados de microfabricación, similares a los utilizados en la producción de chips electrónicos.
Las estructuras se crean a partir de hojas planas de material que son posteriormente transformadas en formas tridimensionales mediante tensiones internas controladas.
Este método permite producir múltiples robots a gran escala, con alta precisión y repetibilidad, algo esencial para aplicaciones prácticas. La capacidad de fabricar estos dispositivos en gran cantidad es uno de los factores que hacen que la tecnología sea prometedora para su uso real.
Aplicaciones potenciales incluyen medicina, microcirugía y operaciones en ambientes inaccesibles a máquinas convencionales
Una de las áreas más prometedoras para este tipo de tecnología es la medicina. Microrrobots de este tamaño pueden, en teoría, ser utilizados para navegar dentro del cuerpo humano.
Podrían realizar tareas como:
- administración localizada de medicamentos
- remoción de obstrucciones en vasos
- monitoreo interno de tejidos
El tamaño reducido permite acceso a regiones donde instrumentos convencionales no pueden llegar, lo que puede transformar procedimientos médicos.
Además, estos robots pueden ser utilizados en entornos extremos, como espacios confinados, estructuras industriales complejas o incluso misiones científicas a escala microscópica.
Las limitaciones actuales incluyen control preciso, alimentación energética e integración con sistemas autónomos
A pesar del avance, la tecnología aún enfrenta desafíos significativos. Uno de los principales es el control preciso en entornos complejos.
Actualmente, el movimiento depende de fuentes externas de calor, lo que limita la autonomía del robot. Además, la ausencia de sistemas embebidos dificulta la ejecución de tareas más complejas.
La integración con sensores, sistemas de comunicación y fuentes de energía miniaturizadas sigue siendo un desafío abierto en la investigación. Estas limitaciones indican que la tecnología aún está en una etapa experimental, aunque con alto potencial de evolución.
La comparación con la robótica tradicional muestra una ruptura en el concepto de movimiento y miniaturización
La mayoría de los robots actuales dependen de motores eléctricos, baterías y sistemas electrónicos relativamente grandes. Esto impone límites físicos al tamaño mínimo de estos dispositivos.
El microrobot de Northwestern representa un cambio de paradigma al eliminar estos componentes y utilizar principios físicos alternativos.

Este enfoque permite reducir drásticamente el tamaño de los robots sin perder funcionalidad básica, algo que no sería posible con tecnologías convencionales. Esta ruptura puede influir en el desarrollo de futuras generaciones de robots en diversas áreas.
La publicación en Science Robotics valida el avance y posiciona la tecnología en la frontera de la microingeniería
El estudio fue publicado en la revista Science Robotics, una de las principales publicaciones científicas en el área de robótica. Esto indica que el trabajo pasó por una revisión rigurosa y fue considerado relevante por la comunidad científica.
Además, la divulgación por parte de la propia Northwestern University refuerza la credibilidad de la información. La combinación de validación científica y aplicación práctica convierte al microrobot en uno de los avances más relevantes recientes en el área de microingeniería.
Este tipo de reconocimiento es fundamental para atraer inversiones y acelerar el desarrollo de la tecnología.
¿Qué revela este microrobot sobre el futuro de las máquinas invisibles y de la ingeniería a escala microscópica?

El cangrejo robótico de 0,5 milímetros muestra que es posible construir máquinas funcionales en escalas extremadamente reducidas, utilizando principios físicos alternativos.
Esto abre camino para una nueva generación de dispositivos capaces de operar en entornos donde la tecnología actual no alcanza. La combinación de materiales inteligentes, bioinspiración y microfabricación puede redefinir el concepto de robótica en las próximas décadas.
A medida que se superen los desafíos técnicos, el impacto de esta tecnología puede expandirse a áreas como la medicina, la industria y la exploración científica.
¿Cree usted que microrobots de este tamaño podrán ser utilizados dentro del cuerpo humano en los próximos años?
La evolución de esta tecnología plantea una cuestión importante sobre sus límites y aplicaciones futuras. Si robots más pequeños que una pulga ya pueden moverse y ejecutar acciones básicas, ¿hasta dónde puede llegar esta miniaturización y cuáles serán sus implicaciones prácticas en el mundo real?





