 Portugués
Portugués  Inglés
Inglés  Español
Español 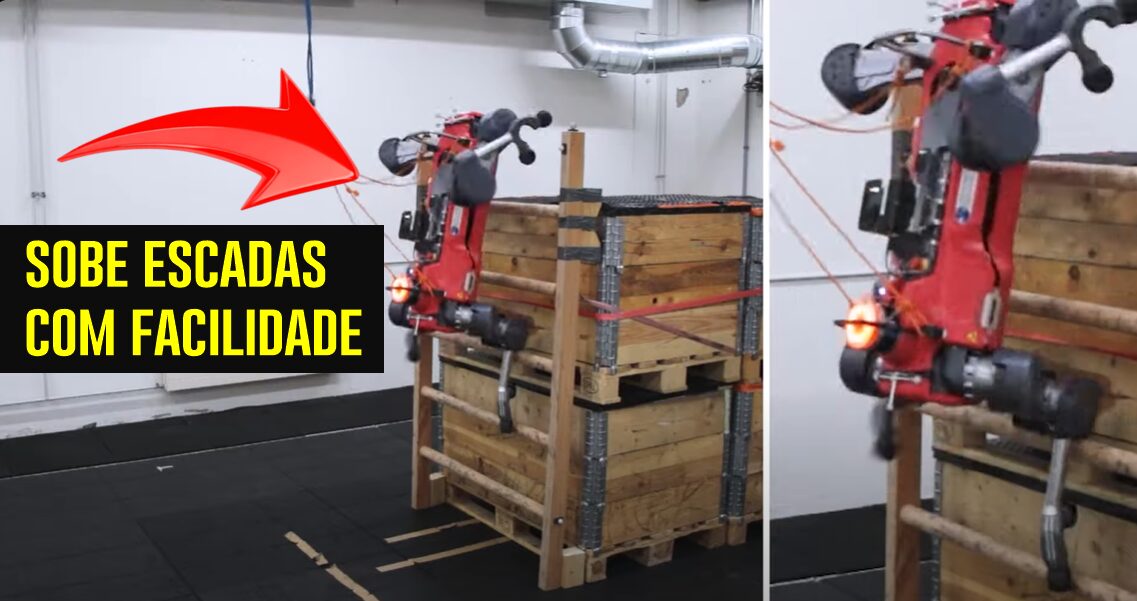
Ingenieros de Suiza crean un robot de rescate capaz de subir escaleras con eficiencia, permitiendo que equipos de emergencia actúen en lugares de difícil acceso. Descubre cómo esta tecnología puede transformar el futuro de las operaciones de rescate.
Los avances en robótica continúan transformando la manera en que los robots interactúan con el mundo, y el más reciente hito proviene de la ETH Zurich, que mejoró el robot cuadrúpedo ANYMal para enfrentar un desafío común: la escalada de escaleras.
El Robotics Systems Lab de la universidad desarrolló una solución innovadora, creando patas en forma de gancho personalizadas para el ANYMal, permitiendo que suba escaleras estándar con una eficiencia impresionante. Esta innovación es un gran paso para convertir robots cuadrúpedos en entornos industriales y de rescate más versátiles.
La Evolución del ANYMal
El robot ANYMal ya era reconocido por su capacidad de moverse en terrenos irregulares, pero la escalada de escaleras representaba una barrera. ETH Zurich enfrentó este desafío modificando el diseño de las patas del robot.
-
La misma universidad que construyó la primera computadora del mundo hace 80 años acaba de crear una partícula que es mitad luz, mitad materia, y que puede hacer que la inteligencia artificial sea mucho más rápida gastando una fracción de la energía de hoy.

-
Até 132 millones de personas más pueden acabar por debajo de la línea del mar, advierte un estudio de Nature que revisó 385 investigaciones y concluyó que 9 de cada 10 subestimaron el nivel real del océano en las costas del mundo.
-
Starship V3 de SpaceX enfrenta su 12º vuelo con tecnología inédita, reutilización rápida y planes que pueden acercar a los humanos a la Luna y Marte.

-
Olvídate del asfalto con petróleo: empresa de Escocia transforma 684 mil botellas plásticas en un kilómetro de carretera 60% más resistente y hasta 10 veces más duradera, y la tecnología ya ha comenzado a sustituir el asfalto tradicional en más de 30 países.




En lugar de intentar adaptar garras o manos tradicionales, los ingenieros se inspiraron en la manera en que los seres humanos forman naturalmente ganchos con las manos al subir escaleras.
El equipo desarrolló patas en forma de gancho que pueden sujetarse firmemente a los peldaños, proporcionando una sujeción segura y estable. Además del hardware, el robot fue entrenado para usar estas nuevas patas a través de aprendizaje por refuerzo, un enfoque que utiliza simulación para enseñar al robot a subir escaleras de manera efectiva y rápida.
Este método, llamado paradigma maestro-alumno, involucra un robot instructor que enseña a los robots alumnos a enfrentar diferentes escenarios de escalada.
Desempeño y Pruebas en el Mundo Real del Robot de Rescate
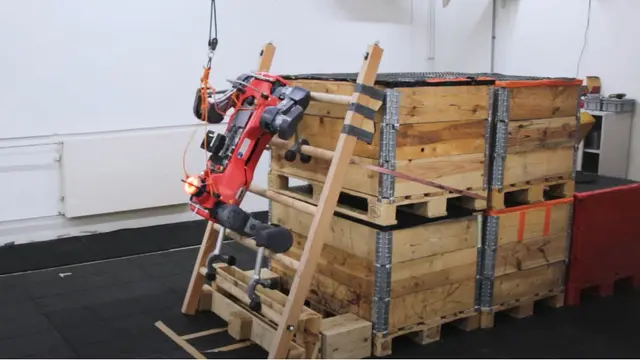
Tras el entrenamiento, el ANYMal fue sometido a pruebas en escaleras reales. Los resultados fueron impresionantes: el robot alcanzó una tasa de éxito del 90% al subir escaleras con ángulos variando de 70° a 90°. Esto representa una mejora significativa respecto a versiones anteriores del ANYMal, que tenían dificultades con este tipo de terreno.
El diseño de los ganchos permitió que el robot superara escaleras inestables y mal colocadas, manteniendo un desempeño consistente incluso durante perturbaciones inesperadas.
Además, el ANYMal demostró una escalada 232 veces más rápida que el estado del arte anterior en robots cuadrúpedes. La robustez de este nuevo sistema se evidencia por una tasa de éxito del 96% en simulaciones que incluían terrenos difíciles y escenarios generados aleatoriamente.
Robots Cuadrúpedes y la Escalada de Escaleras
La escalada de escaleras ha sido un desafío para robots cuadrúpedes y humanoides. Mientras que los robots con patas suelen ser más eficaces que los robots con ruedas en terrenos irregulares, las escaleras representan un obstáculo significativo.
La incapacidad de navegar en escaleras limita la utilidad de estos robots en entornos industriales y de rescate, donde las escaleras son comunes.
Investigaciones anteriores sobre escalada de robots humanoides revelaron limitaciones en términos de velocidad y adaptabilidad a diferentes tipos de escaleras.
De igual manera, los robots cuadrúpedes enfrentaban dificultades para subir escaleras verticales. ETH Zurich superó estos desafíos combinando el diseño innovador de las patas en gancho con aprendizaje por refuerzo, resultando en una solución efectiva para la escalada en escaleras.
Enganchado por el Éxito
El enfoque de aprendizaje por refuerzo utilizado por ETH Zurich permitió que el ANYMal se convirtiera no solo en un robot eficiente en la escalada de escaleras, sino también más adaptable a diferentes condiciones.
Al utilizar simulaciones extensivas con terrenos generados aleatoriamente, los robots alumnos aprendieron a manejar una variedad de situaciones, desarrollando habilidades robustas de escalada de manera más rápida y eficiente.
Además de las pruebas en el mundo real, el equipo planea incorporar nuevos sensores, como cámaras de profundidad, para mejorar aún más la capacidad del ANYMal de subir y bajar escaleras. Esto abrirá nuevas posibilidades para el uso de robots cuadrúpedes en entornos peligrosos, como operaciones de rescate en áreas de difícil acceso.

Futuro de las Operaciones con Robots Cuadrúpedes
Aunque el diseño actual de los ganchos ha demostrado ser extremadamente efectivo, el equipo de ingenieros de ETH Zurich reconoce que hay espacio para mejoras. Investigaciones futuras buscarán mejorar aún más el diseño de los ganchos y el control del robot para optimizar su desempeño en una gama más amplia de actividades.
Este desarrollo representa un avance significativo para el uso de robots cuadrúpedes en una variedad de sectores, incluyendo inspecciones industriales, operaciones de rescate e incluso misiones en áreas de riesgo. Con una movilidad mejorada, el ANYMal está un paso más cerca de convertirse en una herramienta esencial en entornos desafiantes.
En resumen, el éxito del robot ANYMal en superar escaleras con ganchos personalizados demuestra el poder del diseño innovador combinado con técnicas avanzadas de aprendizaje automático. A medida que la investigación continúa evolucionando, el futuro de la robótica parece prometedor, con soluciones cada vez más adaptables y eficientes para enfrentar los desafíos del mundo real.





¡Sé la primera persona en reaccionar!