 Portugués
Portugués  Inglés
Inglés  Español
Español 
Un robot japonés de apenas 8 centímetros demostró que la exploración lunar también puede avanzar con máquinas pequeñas, autónomas e inspiradas en tecnología de juguetes
Un robot japonés del tamaño de la palma de la mano ganó protagonismo en la exploración espacial al transformarse sobre la superficie de la Luna y registrar una imagen histórica de la misión SLIM, de la Agencia Japonesa de Exploración Aeroespacial, la JAXA. Llamado SORA-Q, el equipo fue enviado como parte del módulo lunar Smart Lander for Investigating Moon y operó de forma autónoma en un entorno extremo.
La historia volvió al debate tras la publicación de un estudio en la revista Science Robotics, en 2026, detallando cómo el pequeño rover logró moverse en el suelo lunar, seleccionar imágenes y transmitir datos sin depender del control directo desde la Tierra. El logro llama la atención porque muestra un camino diferente para futuras misiones: en lugar de depender solo de grandes vehículos, la exploración puede usar robots compactos, ligeros y distribuidos.
El SORA-Q, también identificado como LEV-2, fue desarrollado en colaboración entre JAXA, TOMY Company, Sony Group Corporation y Universidad Doshisha. La propuesta unió ingeniería espacial, sensores, procesamiento de imagen y experiencia de la industria de juguetes en mecanismos de transformación compactos.
-
Un estudio genético muestra que Europa después de Roma no nació de una invasión relámpago, sino de familias, migraciones y mucha mezcla.

-
China quiere instalar un power bank gigante en el espacio para recolectar luz solar sin parar, día y noche, y ya ha probado en tierra, en una torre de 75 metros, el envío de energía sin cables a 100 metros de distancia para varios objetivos en movimiento.

-
La fuerza bruta de las olas se convierte en energía limpia casi sin desperdicio, es lo que promete un conversor giroscópico creado en Japón que, en simulaciones, se acopla al vaivén del mar y alcanza el límite máximo de 50% de aprovechamiento, dejando atrás a los generadores marítimos antiguos.
-
El telescopio espacial de la NASA ya tiene el 73% de las imágenes contaminadas por rastros de satélites, y los científicos advierten que el problema podría llegar al 100% si se lanzan millones de objetos en la órbita baja de la Tierra.





A pesar de su aspecto curioso, el robot no era un juguete llevado a la Luna. Era un demostrador tecnológico preparado para probar movilidad autónoma, comunicación entre robots y operación en terreno lunar, puntos considerados importantes para futuras misiones científicas y de exploración planetaria.
SORA-Q llevó tecnología de juguetes a una misión real en la Luna

De acuerdo con la JAXA, el desarrollo del robot comenzó a partir de una iniciativa de investigación con la TOMY Company en 2016, con el objetivo de crear un robot pequeño, barato y capaz de operar tanto en el espacio como en la Tierra usando tecnologías inspiradas en juguetes. Sony se unió al proyecto en 2019, mientras que la Universidad Doshisha comenzó a participar en 2021.
El resultado fue un rover ultracompacto con cerca de 8 centímetros de diámetro antes de la transformación y un peso aproximado de 250 gramos, según información divulgada por Sony. Para una misión lunar, estas dimensiones son relevantes porque cada gramo lanzado al espacio impacta en el costo, consumo de energía y complejidad de integración con la nave espacial.
TOMY informó que el SORA-Q fue creado para salir del módulo en formato esférico y, al llegar a la superficie, abrir su estructura hasta convertirse en un pequeño vehículo capaz de desplazarse. La tecnología aprovechó el conocimiento acumulado por la empresa en mecanismos compactos, pero adaptado a un ambiente mucho más severo que cualquier producto de consumo.
El robot fue lanzado con la misión SLIM antes de transformar la superficie lunar en laboratorio
La misión SLIM fue lanzada desde el Centro Espacial de Tanegashima, en Japón, el 7 de septiembre de 2023, a bordo del cohete H-IIA. Según JAXA, el objetivo principal era demostrar una tecnología de aterrizaje de alta precisión, llamada “pinpoint landing”, esencial para futuras misiones que necesiten aterrizar cerca de cráteres, pendientes, regiones con hielo o puntos específicos de interés científico.
El aterrizaje ocurrió el 20 de enero de 2024, en horario de Japón, convirtiendo al país en el quinto en lograr un aterrizaje suave en la Luna. JAXA informó que el módulo se comunicó con la Tierra después de tocar el suelo, pero quedó en una posición diferente a la planeada, lo que impidió la generación inmediata de energía por los paneles solares.
A pesar de este problema, la agencia japonesa confirmó que SLIM llegó a cerca de 55 metros al este del objetivo original. La precisión antes de la maniobra final de desvío de obstáculos fue evaluada en aproximadamente 10 metros o menos, lo que permitió a JAXA afirmar que la demostración de aterrizaje dentro de un margen de 100 metros fue alcanzada.
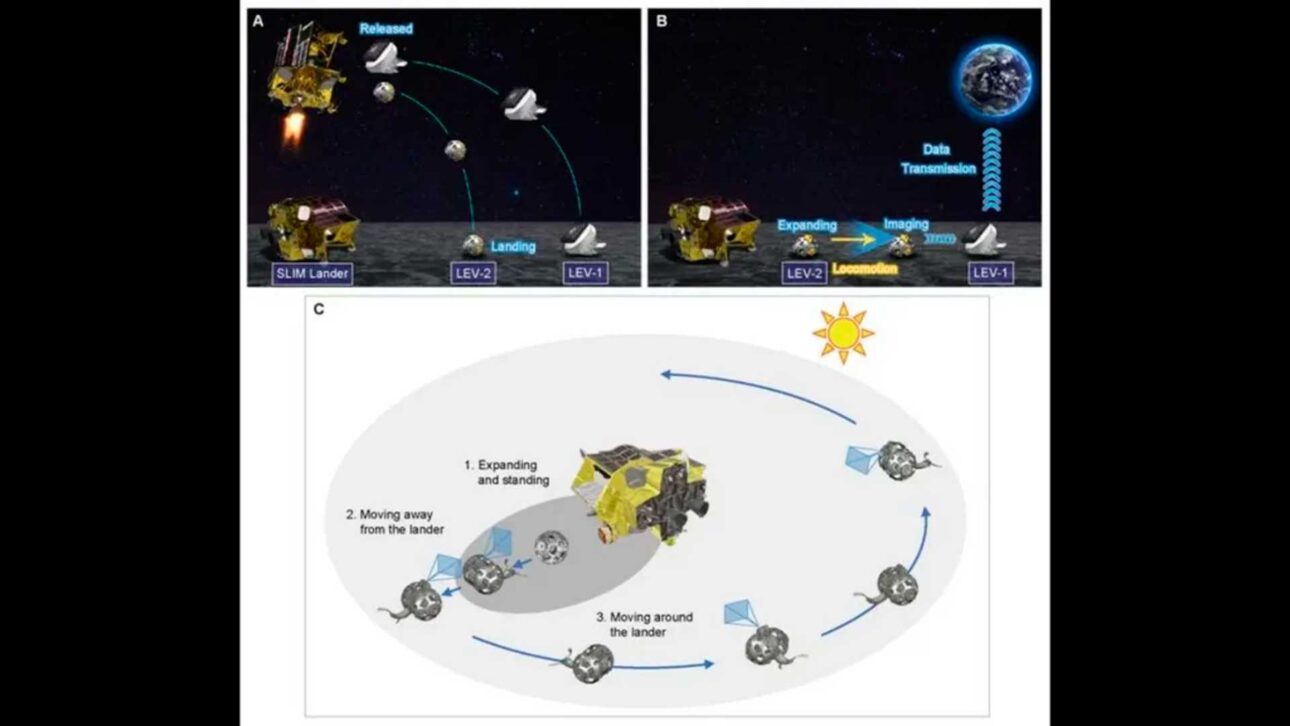
Fue en este delicado contexto que los pequeños vehículos LEV-1 y LEV-2 fueron separados poco antes del aterrizaje. El SORA-Q, o LEV-2, tuvo la misión de registrar imágenes del módulo y del entorno, mientras que el LEV-1 funcionó como parte del sistema de retransmisión de datos.
Cómo la esfera se transformó en rover en el suelo lunar
El SORA-Q viajó hasta la Luna en formato esférico, una solución que facilitó el transporte y redujo el volumen ocupado dentro de la misión. Después de ser liberado, el robot abrió su estructura y pasó a una configuración con ruedas, usando las dos mitades de la esfera como elementos de locomoción.
Sony explicó que el sistema también contaba con una cámara y recursos de procesamiento integrado para permitir que el rover reconociera el módulo SLIM y eligiera imágenes útiles para transmisión. El equipo no fue diseñado para largas distancias, sino para una tarea objetiva: moverse cerca del módulo de aterrizaje, fotografiar y enviar información crítica.
La comunicación también fue diseñada para ahorrar energía y simplificar el robot. En lugar de transmitir directamente a la Tierra, el SORA-Q envió datos al LEV-1, que luego retransmitió la información a los controladores de la misión.
Según la divulgación conjunta de JAXA, Sony, TOMY y Doshisha, la imagen capturada por el SORA-Q comprobó varias etapas al mismo tiempo: la transformación del robot, su desplazamiento en el suelo lunar, la captura de imágenes, la selección autónoma de los datos y la comunicación inalámbrica con el LEV-1.
Foto del aterrizaje ayudó a explicar por qué la SLIM quedó en posición inesperada
La imagen tomada por el SORA-Q se convirtió en una de las más importantes de la misión porque mostró la SLIM sobre la superficie lunar en una posición anormal. Según la JAXA, datos técnicos indicaron que uno de los dos motores principales probablemente perdió empuje a unos 50 metros de altitud, antes del inicio de la maniobra de evasión de obstáculos.
Aun así, el software de a bordo de la SLIM identificó la anomalía y continuó el descenso con el otro motor, intentando controlar la posición horizontal lo máximo posible. La agencia informó que la velocidad de contacto con el suelo quedó dentro del rango de diseño, pero la actitud y la velocidad lateral contribuyeron a que el módulo terminara en una posición diferente a la planeada.
En este punto, el SORA-Q cumplió un papel que va más allá de la curiosidad tecnológica. Al fotografiar el módulo en la Luna, el pequeño rover proporcionó evidencia visual para evaluar el resultado del aterrizaje, ayudando a los ingenieros a entender mejor el comportamiento de la nave espacial tras el contacto con el suelo.
Estudio de 2026 muestra por qué pequeños robots pueden ser útiles en futuras misiones
El estudio publicado en Science Robotics, presentado en junio de 2026, detalló cómo el LEV-2 SORA-Q logró realizar exploración lunar autónoma en escala extremadamente reducida. La investigación describe al robot como una plataforma capaz de navegar alrededor del módulo de aterrizaje, capturar imágenes del módulo y del entorno y transmitir los datos seleccionados por comunicación inalámbrica.
Según la cobertura científica de Phys.org sobre el artículo, el SORA-Q operó por cerca de 108 minutos antes de la pérdida de comunicación. El tiempo fue corto, pero suficiente para demostrar que microrrobots pueden ejecutar tareas útiles en misiones en las cuales tamaño, peso, energía y costo son limitados.
La misión también reveló desafíos importantes. Los robots muy pequeños tienen menos batería, menor capacidad de procesamiento y enfrentan dificultades para moverse en terrenos cubiertos por regolito, el suelo fino y polvoriento de la Luna. Por eso, la solución transformable fue relevante: el robot combinó formato compacto en el transporte con una configuración más adecuada para locomoción después del aterrizaje.
Otro punto destacado por los investigadores fue la necesidad de mejorar telemetría, comunicación entre vehículos y flexibilidad de software en futuras versiones. En misiones más largas, robots de este tipo necesitarán lidiar con imprevistos sin depender de instrucciones constantes de la Tierra.
Japón usa la SLIM para mostrar nueva fase de la exploración lunar
La misión SLIM no fue importante solo por el SORA-Q. Según la JAXA, la propuesta era cambiar la lógica de “aterrizar donde es posible” a “aterrizar donde se desea”, un avance esencial para misiones que necesitan llegar con precisión a puntos de interés científico.
Después del aterrizaje, la SLIM llegó a ser apagada por la posición desfavorable de los paneles solares, pero volvió a operar cuando la iluminación cambió. En agosto de 2024, la JAXA cerró oficialmente las actividades del módulo, después de perder contacto con la nave espacial. Aun así, la agencia informó que la misión superó expectativas al sobrevivir a tres noches lunares, algo que no formaba parte del plan original.
Este desempeño reforzó la relevancia del proyecto japonés. La SLIM probó aterrizaje preciso, observaciones con cámara multibanda y operación de pequeños robots, mientras que el SORA-Q mostró que tecnologías provenientes de sectores aparentemente distantes, como la industria de juguetes, pueden encontrar aplicaciones reales en la exploración espacial.
Lo que el pequeño rover japonés puede representar para la exploración de la Luna y de Marte
La experiencia del SORA-Q indica que futuras misiones lunares pueden usar enjambres o conjuntos de robots pequeños para explorar áreas cercanas a módulos de aterrizaje, cráteres, cuevas, pendientes y regiones donde vehículos más grandes tendrían dificultad. Estos robots no sustituyen a grandes rovers científicos, pero pueden funcionar como exploradores auxiliares, ampliando la visión de la misión y reduciendo riesgos.
También hay una ventaja económica. Por ser más pequeños y ligeros, plataformas como el SORA-Q pueden ser integradas a misiones más grandes sin exigir gran volumen de carga. Esto abre espacio para que diferentes sensores, cámaras y sistemas de comunicación sean probados en ambientes reales.
El robot japonés llamó la atención justamente por unir simplicidad visual y alta complejidad técnica. Parecía un pequeño “transformer” lunar, pero su valor científico estaba en la autonomía, en el bajo peso, en el mecanismo de locomoción y en la capacidad de generar datos útiles en una misión histórica.
El caso muestra que la próxima etapa de la exploración espacial puede no depender solo de máquinas gigantes y carísimas. En algunos escenarios, robots pequeños, inteligentes y cooperativos pueden ser la diferencia entre solo aterrizar en otro mundo y realmente entender lo que sucedió al llegar allí.






¡Sé la primera persona en reaccionar!