 Portugués
Portugués  Inglés
Inglés  Español
Español 
La Exploración Espacial Puede Dar un Salto con Robots Controlados Remotamente, Diseñados para Operar en la Luna y Marte. Descubre Cómo las Primeras Pruebas Indican que Esta Tecnología Puede Ser el Futuro de la Exploración de Nuevos Mundos!
La exploración espacial está a punto de dar un nuevo paso con el uso de robots controlados remotamente para operar en entornos hostiles como la Luna y Marte.
Los avances en teleoperación de vehículos robóticos han mostrado un gran potencial, permitiendo que humanos en la Tierra manejen herramientas y equipos en el espacio con precisión. Estos robots de exploración espacial pueden realizar tareas complejas como recolección de muestras, excavación y montaje de estructuras en planetasterrenos o lunas distantes.
Primeras Pruebas Prometedoras
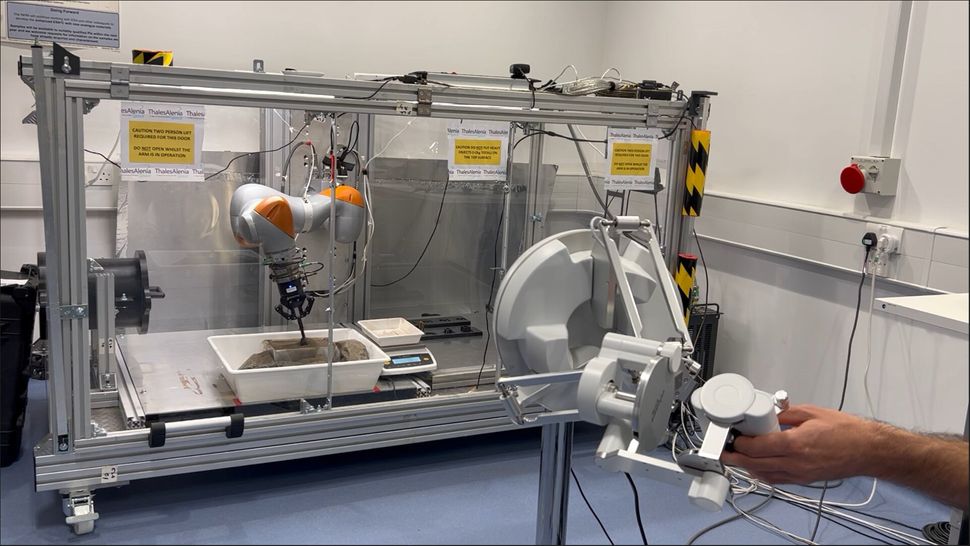
Recientemente, el laboratorio de robótica de la Universidad de Bristol, en Inglaterra, probó un sistema innovador de teleoperaciones en el Centro Europeo de Aplicaciones Espaciales y Telecomunicaciones de la Agencia Espacial Europea (ESA).
-
Um volcán submarino en el fondo del mar de Oregón da señales claras de que va a entrar en erupción y los científicos observan todo en tiempo real.

-
Ciclón gana fuerza y provoca un cambio drástico en el clima: nueva masa de aire polar derrumba temperaturas, amplía el riesgo de heladas y lleva lluvias intensas a diversas regiones de Brasil en los próximos días.

-
La batería de estado sólido, prometida durante años como el futuro de los coches eléctricos, finalmente comienza a salir del laboratorio para la producción en masa.
-
Tres adolescentes sorprenden al mundo al crear un polvo con semillas de tamarindo que elimina microplásticos del agua, no requiere electricidad y gana un premio internacional de US$ 12,500 en The Earth Prize 2026.





El equipo logró operar remotamente un brazo robótico para excavar una muestra de regolito lunar simulado, usando una simulación virtual. Esta tecnología elimina la necesidad de imágenes en vivo, que pueden sufrir retrasos debido a la distancia entre la Tierra y la Luna.
El retraso en la señal entre los dos cuerpos celestes es de aproximadamente 1,3 segundos, lo que puede ser suficiente para dificultar la precisión en operaciones delicadas.
No obstante, con el sistema de teleoperación, las señales pueden ser retransmitidas por satélites, como los planeados en el proyecto Moonlight de la ESA, que busca mejorar la comunicación lunar.
Exploración Espacial: Sintiendo el Ambiente Lunar
Una de las mayores diferencias de esta tecnología está en las interacciones hápticas, que proporcionan una sensación de tacto al operador. Esto significa que los teleoperadores en la Tierra pueden sentir la resistencia del suelo lunar, como si realmente estuvieran excavando en un entorno con un sexto de la gravedad terrestre.
El equipo de Bristol probó esta funcionalidad en tareas simples, como presionar el suelo o arrastrar una pala, pero aún planea avanzar hacia misiones más complejas.
Según Joe Louca, uno de los responsables del proyecto, la posibilidad de ajustar la intensidad de la gravedad en la simulación permite preparar astronautas para el ambiente real de la Luna. Él destaca que el feedback táctil ofrece una sensación realista de cómo se comportaría el polvo lunar.
Superando los Desafíos de Confianza
Antes de poner esta tecnología en práctica, aún existen desafíos psicológicos que deben superarse. Uno de los mayores problemas es la confianza de los operadores en que el sistema virtual está realmente reflejando la realidad física en el espacio. Estudios ya han demostrado que esta falta de confianza puede ser una barrera para el uso pleno de la teleoperación.
No obstante, el equipo de Louca obtuvo resultados positivos en las pruebas. Durante la recolección de regolito simulado, el sistema fue 100% eficiente y 92,5% confiable.
Aunque verter el regolito fue una tarea un poco menos precisa, identificaron que ajustes en la orientación de la pala del robot mejoraron el rendimiento.

Aplicaciones Futuras en Marte
Aunque el enfoque inicial es la Luna, la teleoperación de robots también puede desempeñar un papel crucial en futuras misiones a Marte.
La recuperación de muestras del suelo marciano es una tarea extremadamente desafiante, y robots controlados remotamente podrían ayudar en la recolección y transporte de muestras hacia vehículos que las traigan de regreso a la Tierra.
El proyecto de retorno de muestras de Marte de la NASA, por ejemplo, ya enfrenta desafíos de presupuesto y cronograma. La Rocket Lab, empresa contratada por la NASA, está realizando estudios para desarrollar una solución, y es posible que la teleoperación se integre en el futuro. Sin embargo, el uso de esta tecnología para Marte aún está en fases iniciales de exploración.
Con el avance de las misiones espaciales en los próximos años, como el programa Artemis de la NASA y el Chang’e de China, el uso de robots teleoperados puede ser una herramienta valiosa para apoyar tanto misiones tripuladas como no tripuladas.
La capacidad de entrenar astronautas y realizar operaciones complejas remotamente convierte esta tecnología en una promesa para el futuro de la exploración espacial.





¡Sé la primera persona en reaccionar!